General
Inquiry Form
Controls
Adaptive Stabilizer
Controls
The Brains of the System
Quantum Marine Stabilizers
Quantum Marine Stabilizer Control Systems
Quantum’s stabilizer controls are specially designed to optimize roll reduction. Each Quantum control system automatically senses changes in the ship’s motions and sends adaptive, real-time signals to the stabilizer system.
The control interprets the roll angle and roll velocity from the roll sensor. It then uses that data, along with Quantum’s propriety algorithms, to determine and direct the optimal fin activity to reduce the roll of the vessel.
In order to optimize roll control, each stabilizer controller must be configured to the type of system, the ship’s requirements and characteristics. Quantum’s controls can be configured for the following stabilizer systems:
- Underway and Zero Speed™
- Conventional and XT™ Fins
- MAGLift™ Rotors
- Dyna-Foil™ Retractables
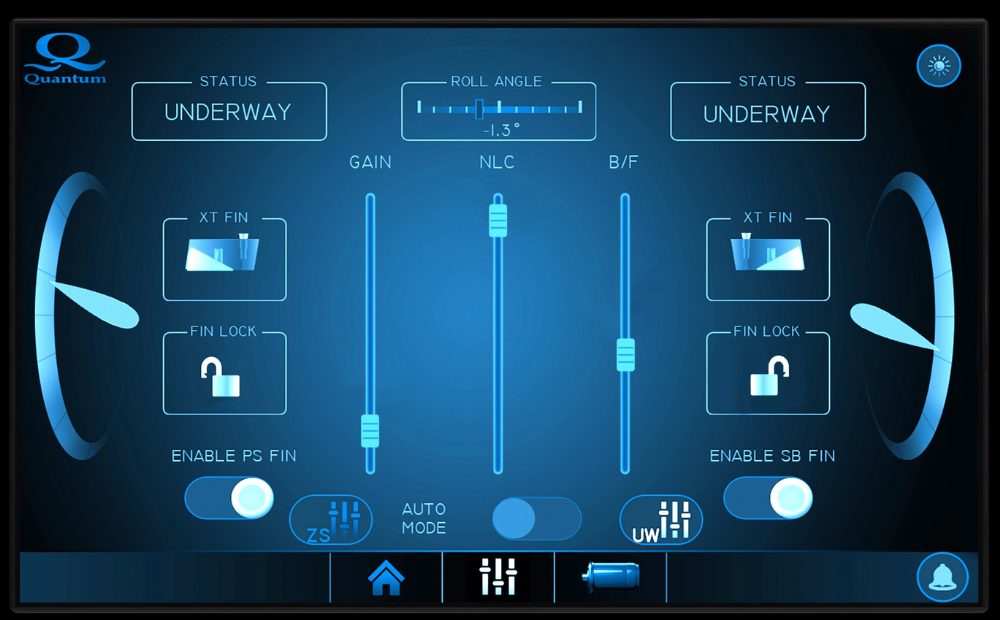


5000S the most Advanced Stabilizer Control
The new 5000S is built on a modular platform, giving it the ability to support old, current and future control generations.
It can be configured to support the most basic, underway only systems as well as Zero Speed™, including the more advanced stabilizer systems developed in recent years.
With a heavy influence of durability, reliability and long-range capacity for future development, the 5000S is by far the single largest leap forward Quantum has made in control technology.
To do this economically, the controller was designed to have plug in/add on modules to increase capacity when needed and minimizing the cost of construction for the less complex units. The new technology can be uploaded directly on to a vessel that is already in service.
Remote Access, the ability for Quantum to conduct service and support remotely, is a key advantage to the end user in reducing system down time and avoiding billable, travel expenses.
The 5000S interface is via a hi def 10” TFT – High-Performance Sunlight-Readable Display with an option for a standard 15” monitor in the engine room.
The system provides recommendations on individual control settings and how to adjust those settings. The controls can also store critical information about the system, including, but not limited to project specific drawings, technical manual information, fluid recommendations etc.
5000S Features
01
Dual-Mode Operation & Beyond:
The 5000S can accommodate the most basic underway only systems as well as Zero Speed™ technology. It is built on a modular platform, with the ability to support old, current and future control generations. It is the only control system with recording capabilities that can be stored and downloaded later.
02
Easy-to-Understand & Operate:
The system provides recommendations for individual control settings and how to adjust those settings. The system can store critical information including drawings, manual information and fluid recommendations. The user interface is intuitive, making it easier to run operations independently.
03
Simple Installation:
The new technology can be uploaded directly on to a vessel that is already in service. The plugin/add on modules allow for increased capacity when needed, but designed to keep costs down for less robust systems.
04
Safety Precautions:
The 5000S was designed to withstand harsh marine environments. Users can take advantage of Quantum’s Remote Access service and support and service from anywhere in the world. For security purposes, the internet modules are individually registered and only possible through a dedicated in-house server at Quantum.
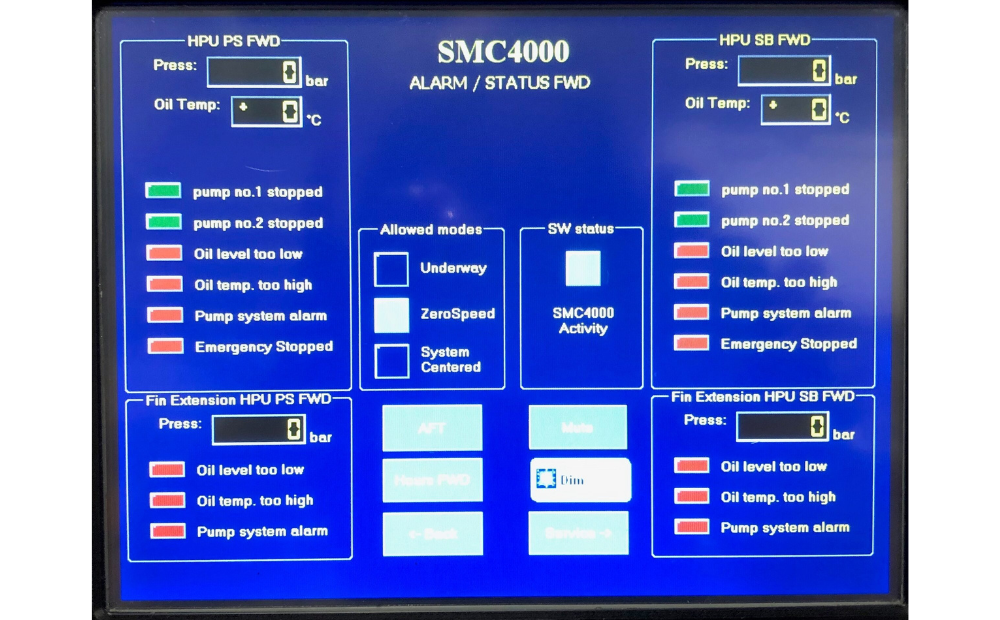
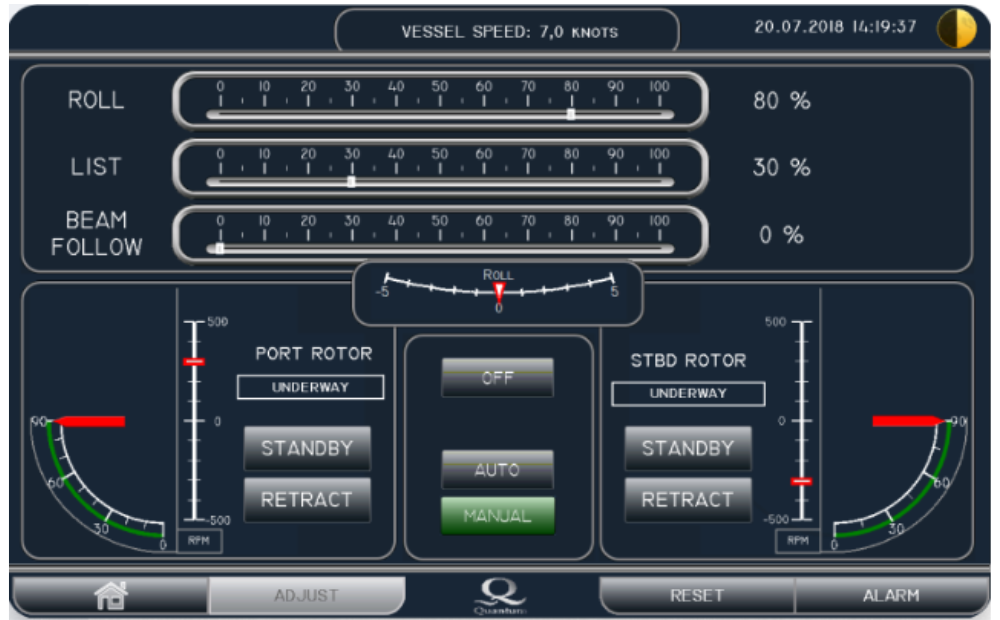
SMC4000 – Advanced Ship Motion Control with Touch Screen
SMC4000 – Quantum’s most technologically advanced, touch screen control, is the SMC (Ship Motion Control). The SMC stabilizer controls consist of a control box, control boards and circuitry, and a touch screen operator interface.
The program logic for the SMC control is custom-designed for the application and communication for the SMC ship motion control system is via ethernet. This combination allows for maximum system feedback to the operator.
The SMC4000, the most popular model, is ideal for underway and zero speed™ stabilization. The control logic or algorithms use the necessary parameters to quickly comprehend vessel roll motions and then initiate an immediate response to optimize roll reduction. The adaptive logic tailors the ride to accommodate various boat specifications and operating conditions.
The ability to separate the control box and operator touch-screen, allows for flexibility in installation. The control box, the bulkier of the two items, can be installed in a convenient location within the ship and does not have to be installed on the bridge. In addition, the touchscreen can be completely blacked-out to minimize disturbances for night operations.
SMC4000 Features
01
Dual-Mode Operation:
The SMC4000 features an Automatic Mode, which accounts for vessel motions and adjusts the system response, without the need for continual manual adjustments. The control also offers full manual control for those situations in which manual input can result in improved performance.
02
Easy-to-Understand & Operate:
The SMC4000 control head, which is to be mounted on the bridge for easy access, features an LED display of stabilizer activity, easy to use controls, and a dimmable display for nighttime navigation. System alarms can be displayed on the SMC4000 control head, or can be integrated with the ship’s central alarm monitoring system.
03
Simple Installation:
The control system is comprised of a minimal quantity of components, which are quickly and easily bolted into place.
04
Safety Precautions:
To avoid damage to the stabilizer system, the SMC4000 ensures that the stabilizer fin is automatically brought to the center position when "neutral" or "astern" operations are employed. The “center” function can also be set by the push of a button.
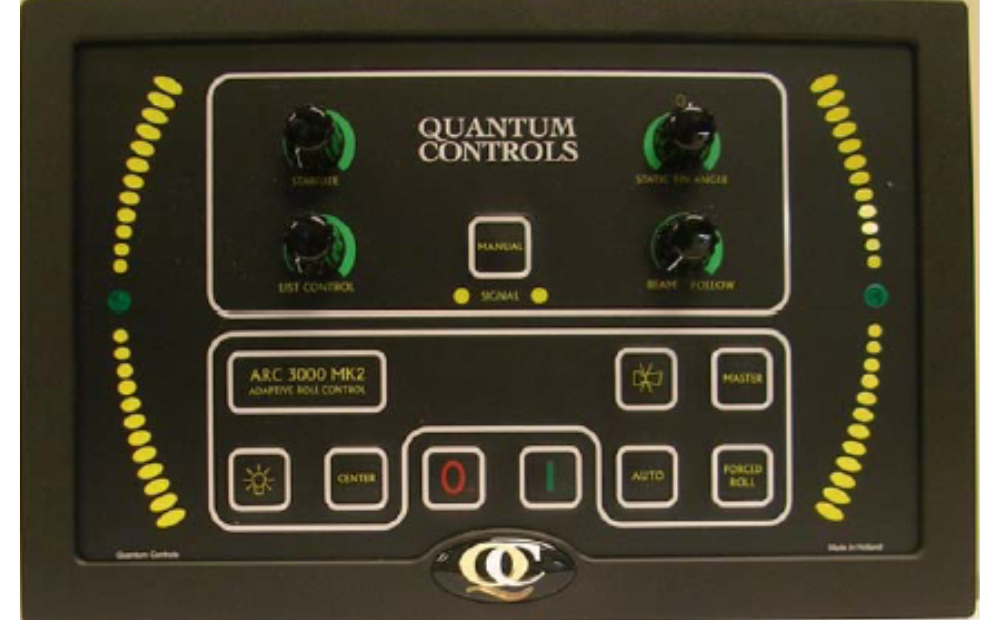
ARC3000/3001 – Adaptive Roll Control for Underway Only & Zero Speed
ARC (Adaptive Roll Control) – Quantum’s conventional control is the ARC3000 series of stabilizer controls.
The ARC3000 series of stabilizer controls is comprised of units that are designed for specific stabilizer applications:
- ARC3000 for conventional underway fin stabilization
- ARC3001 for underway and Zero Speed fin and XT™ fin stabilization
The ARC series of controllers feature a single unit housing the main control circuitry and the operator interface. The compact and rugged design makes this unit ideal for retrofit yacht and military applications. In addition, the traditional push-buttons and knobs on the ARC controllers provide direct and immediate feedback of overall system condition and performance.
Basic operation of the ARC control is also accessible via Quantum’s RCU (Remote Control Unit). The two RCU units that are currently available:
- RCU3000 (for connection to ARC3000 controls)
- RCU3001 (for connection to ARC3001 controls).
The RCUs offers the ability to transition between stabilizer modes, view stabilizer fin activity, and view or silence main fin system alarms.
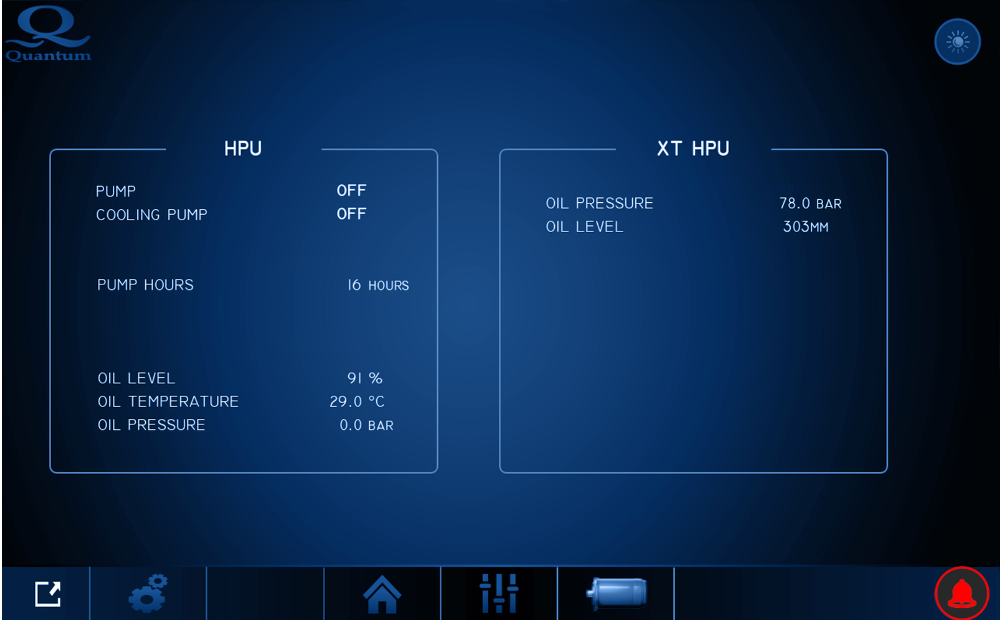
Local Control Modules
Local Control Modules
The output from the main stabilizer control is directed to a local control module positioned near each stabilizer unit. The local control module compares the activities of its corresponding stabilizer unit with the activity required by the main control, to ensure any deviations are promptly corrected. Quantum offers three local stabilizer control modules: FCM (Fin Control Module), ECM (Effector Control Module), and RCM (Rotor Control Module).
FMC
Fin Control Module - Quantum’s conventional local control module. It is a compact control unit designed to automatically accommodate for variation in actual and required activities, with little or no user interaction required.
ECM
Effector Control Module - This unit performs the same functions as the FCM, but provides increased processing power and integrates various control features including a local display and ethernet connectivity.
RCM
Rotor Control Module - This uses the functionality of the ECM unit with additional controls required to operate the MAGLift™ rotor.
